
 首页
首页 项目背景
项目背景 该项目甲方需要使用机器人实现对激光切割后钢板的自动抓取、搬运。
需要具备视觉功能,实现对切割后产品的识别、定位,引导机器人动作。
需要直角坐标型机器人(桁架式机器人),具备大负载能力、长行程特点。
需要配置双抓手,能单抓手运动,也能双抓手协同搬运大尺寸产品。

桁架机器人智能搬运
项目背景 该项目甲方需要使用机器人实现对激光切割后钢板的自动抓取、搬运。
需要具备视觉功能,实现对切割后产品的识别、定位,引导机器人动作。
需要直角坐标型机器人(桁架式机器人),具备大负载能力、长行程特点。
需要配置双抓手,能单抓手运动,也能双抓手协同搬运大尺寸产品。


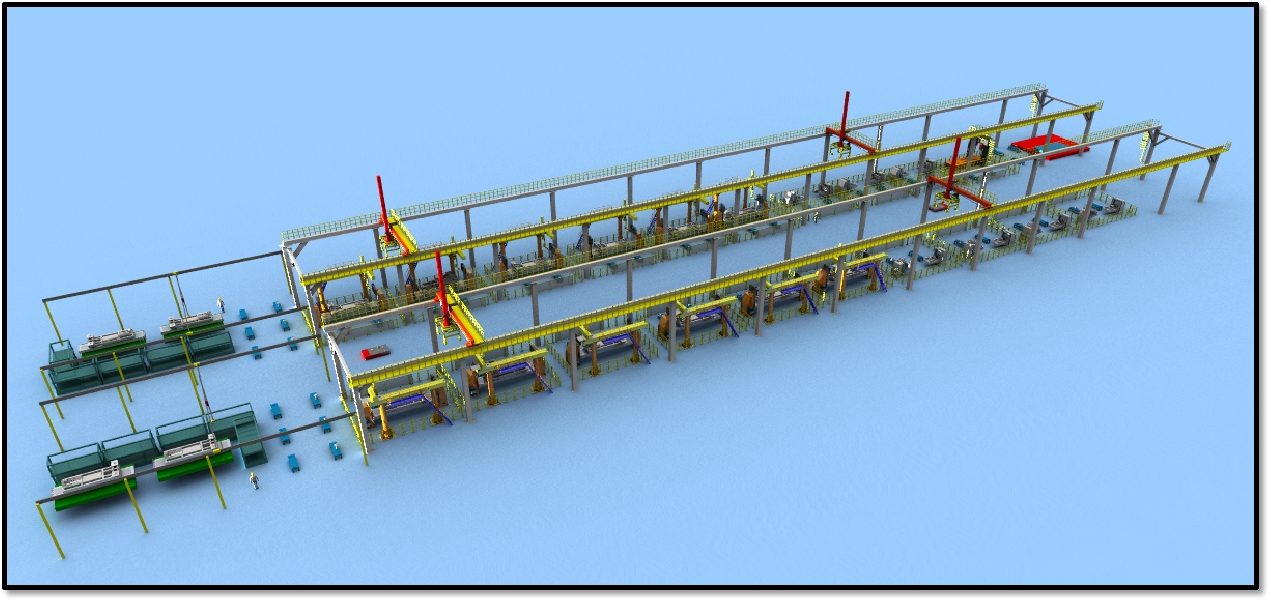

产品详情 为客户提供了2台1000kg负载的共X轴直角坐标机械手,共计7个轴,配置了视觉单元,可对激光切割后的产品自动识别、找到重心,并引导机器人规划轨迹进行抓取。配置了双抓手协同控制系统及切割连扳检测系统,能实现对大尺寸产品的双抓手协同搬运,以及对切割不透导致的连扳问题能及时检测。本桁架机器人系统对接AGV搬运系统,桁架机器人完成产品搬运拣选入料框,AGV进行料框搬运。
项目案例
最新案例
